Робофестиваль Нова, 31.01.2026
Открытие
В Атриуме - огромном трёэтажном пространстве заместитель директора гимназии Елена Евгеньевна Матюшенко торжественно открыла уже II Робофестиваль Нова, представило жюри соревнований, состоящее из сотрудников научных и образовательных организаций Троицка.
После открытия начались соревнования по трём направлениям - Кегельринг, РобоСумо и РобоЛёт, а во второй половине дня добавилось четвёртное направление - РобоСпас и пятое - РобоЛёт.
После открытия начались соревнования по трём направлениям - Кегельринг, РобоСумо и РобоЛёт, а во второй половине дня добавилось четвёртное направление - РобоСпас и пятое - РобоЛёт.
Участников Кегельринга и РобоСумо было меньше, чем в прошлом году, но используемые алгоритмы - сложнее.

КегельРинг
Участники собирали роботов из представленных конструкторов Lego, программировали их сначала в выделенных площадках-кабинетах, а затем переместились в Атриум, где все желающие могли видеть трудоёмкий процесс совершенствования роботов и управляющих программ и, конечно же, поддержать участников! В этом году участники реализовали пару сложных алгоритмов, например, сбивание кегель по спирали.
РобоСумо
Соревнование РобоСумо никого не оставит равнодушным - дуэль двух роботов всегда захватывает внимание!

РобоЛёт (практический тур Робофеста)
На направлении РобоЛёт, являющее практическим туром олимпиады Робофест по физике, 2 уровня РСОШ, прибыло много гостей из других городов. Хотя неделей ранее и было проведено внутреннее соревнование среди 1-6 классов Гимназии Им. Н.В, Пушкова, на этот раз участники столкнулись с новыми проблемами- в Библиотеке было много помех при передаче видеосигнала с коптеров из-за большого количества аналоговых передатчиков в одном месте, и даже глушение WiFi. Но проблемы были решены организационно (всем кто не участвует в полётах - сказали выключить пульты и не включать :)) и зачётные полёты успешно состоялись!
Более подробно по направлению РобоЛёт смотрите на отдельной страничке.
Более подробно по направлению РобоЛёт смотрите на отдельной страничке.

РобоСпас (практический тур Робофеста)
Соревнование РобоСпас началось в 14 часов, выступило 3 команды, представивших 3 разных решения задачи спасения роботизированной тележки с урановой рудой, которую надо было доставить через реку из лавы.
Инженерные листы были подготовлены в соответствии с требованиями регламента и хорошо описывали технические решения, основные узлы и детали, применяемые алгоритмы и главную процедуру управления.
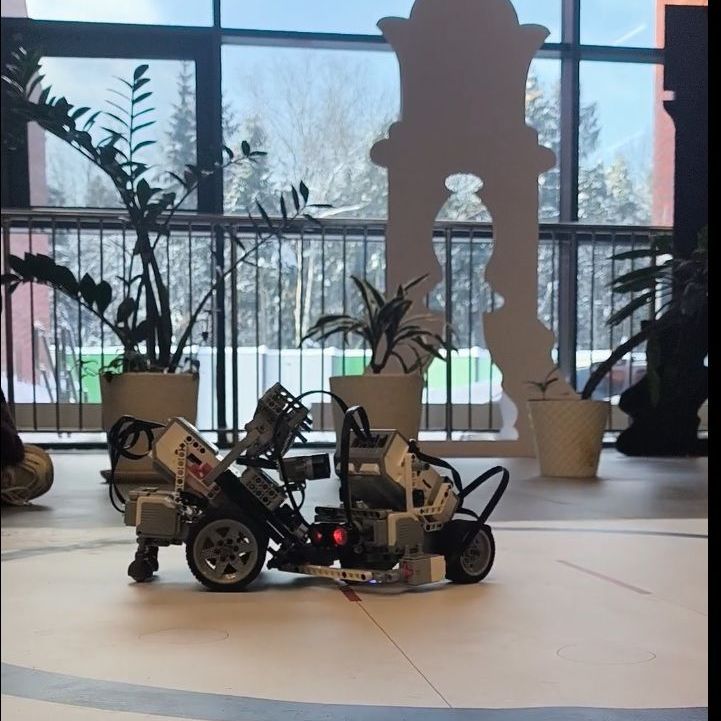
Хоть робототехнический комплекс команды Слоники из двух роботов - транспортёра и эвакуатора не сильно изменился внешне, зато программа была существенно переработана.
После непродолжительной подготовки команда Слоники досрочно сделала первый заезд, который был сделан без помарок - было набрано 40 баллов из 40 максимальных, см. видео. Тут же, по инициативе команды, был сделан второй заезд, но он оказался удачным лишь наполовину - робот-эвакуатор, съезжая, провалился задним колесом-опорой между опорой моста и пандусами, см. видео.
Инженерные листы были подготовлены в соответствии с требованиями регламента и хорошо описывали технические решения, основные узлы и детали, применяемые алгоритмы и главную процедуру управления.
Хоть робототехнический комплекс команды Слоники из двух роботов - транспортёра и эвакуатора не сильно изменился внешне, зато программа была существенно переработана.
После непродолжительной подготовки команда Слоники досрочно сделала первый заезд, который был сделан без помарок - было набрано 40 баллов из 40 максимальных, см. видео. Тут же, по инициативе команды, был сделан второй заезд, но он оказался удачным лишь наполовину - робот-эвакуатор, съезжая, провалился задним колесом-опорой между опорой моста и пандусами, см. видео.
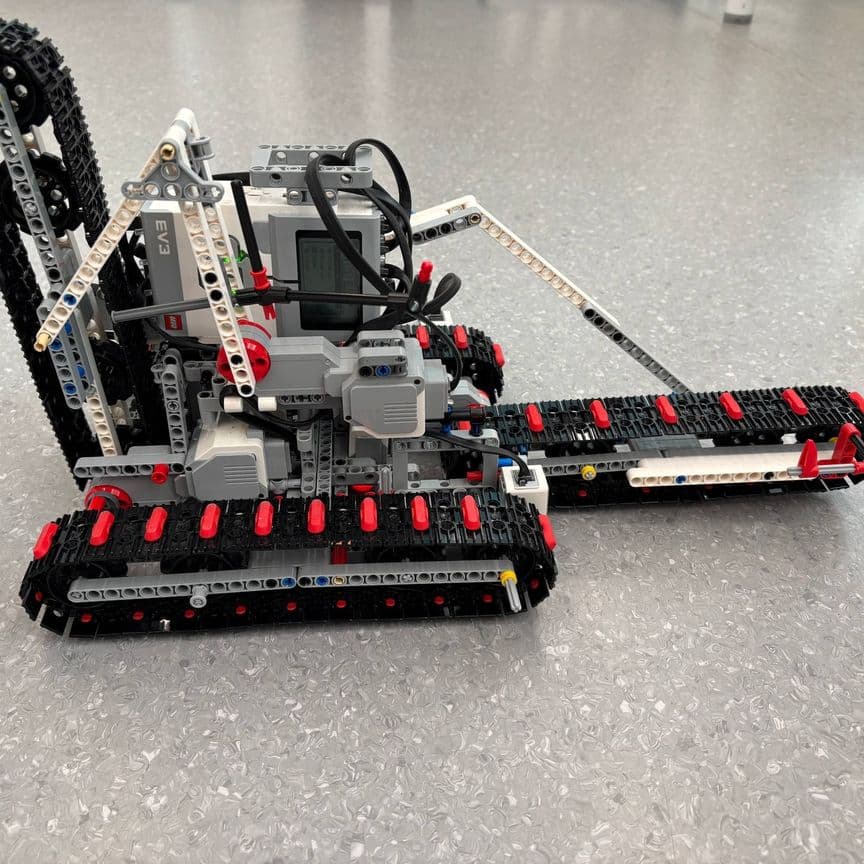
Гусеничный Слоняра. :)
Гусеничный робот, хоть внешне и выглядел как в прошлом году, был конструктивно пересобран из-за выявленных ранее проблем: конструкция была не совсем симметричной (перекошенной), что создавало трудности для стабильного проезда - казалось, что робот развалится по дороге :), а датчик гироскопа так сильно трясся, что это постоянно заканчивалась дрейфом гироскопа (сбой, когда показания гироскопа непрерывно растут в одну сторону). Поэтому рама была полностью переделана, изменилось расположение и длины рычагов приводов, что потребовало новых расчётов наших физиков-конструкторов.
Также была серьёзно переписана программа выполнения основной задачи.
В первой попытке робот успешно забрал тележку с грузом, но неверно выбрал направление движения через лаву и частично свалился с опоры в лаву, повиснув на краю опоры, хотя в предыдущих заездах всё было хорошо, см. видео. Также была серьёзно переписана программа выполнения основной задачи.
После доработки программы робот во второй попытке выполнил задание полностью (почти :), неожиданно выронив тележку с ураном из захвата крупным планом прямо на камеру (такая неприятность случилась впервые за всё время :), что привело к потере 5 баллов за уран и 5 баллов за тележку, см. видео Итоговый счёт - 30 баллов из 40.
Трой
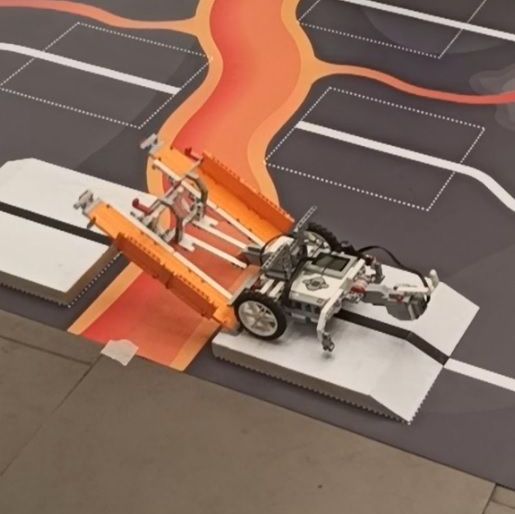
К нам присоединилась третья команда "Трой", которая реализовала интересное решение с укладкой моста (отделяемой части робота) между опорами и переправой по нему. Чтобы робот не опрокидывался, с другой стороны робота установлен балансир-противовес (из большого мотора Ev3), который одновременно выполнил роль захвата для забора тележки с ураном - выглядит очень здорово - как удар хвостом скорпиона! Процедура забора моста не была отлажена до конца, как и весь путь от старта до тележки. Поэтому команда приняла стратегическое решение: выполнить задание частично, оставив мост над лавой, но выполнив другие части задания, что дало бы 38 баллов.
Длительная подготовка, во время которой то всё работало, то не работало :)) . Первый заезд - и сбой, робот перебрался через мост, но сорвался с линии: 22 балла из 40, см. видео. Программистам и конструкторам команды пришлось попотеть, чтобы решить все выявленные недоработки и ошибки, но ко второй попытке всё удалось решить - всё, кроме взятия моста, поэтому только 38 баллов из 40, см. видео! Победа!
Длительная подготовка, во время которой то всё работало, то не работало :)) . Первый заезд - и сбой, робот перебрался через мост, но сорвался с линии: 22 балла из 40, см. видео. Программистам и конструкторам команды пришлось попотеть, чтобы решить все выявленные недоработки и ошибки, но ко второй попытке всё удалось решить - всё, кроме взятия моста, поэтому только 38 баллов из 40, см. видео! Победа!

Итоги
В этот раз количество участников Робофестиваля Нова где-то уменьшилось (может быть из-за погоды? -20 градусов в субботу могут любого заставить задуматься, стоит ли вылезать из под тёплого одеяла :), а в каких-то направлениях и увеличилось. Но все принявшие участие были заряжены на успех! После завершения соревнований, победители и призёры получили дипломы победителей, призёров, сладкие призы и приятные воспоминания , о том, как это было!

Видеоархив соревнований
Общий ролик, дающий представление о событиях!
Когда смотришь удачное и чёткое исполнение задания роботом (да и в любой другой области), кажется, как это легко и просто - не подозревая, сколько затрачено труда, решено проблем, выявлено всяких скрытых подводных камней... Набор фотографий, роликов подготовки, тренировочных и зачётных заездов, которые раскрывают ту сторону красивого заезда, ждёт Вас по ссылке. :)
Когда смотришь удачное и чёткое исполнение задания роботом (да и в любой другой области), кажется, как это легко и просто - не подозревая, сколько затрачено труда, решено проблем, выявлено всяких скрытых подводных камней... Набор фотографий, роликов подготовки, тренировочных и зачётных заездов, которые раскрывают ту сторону красивого заезда, ждёт Вас по ссылке. :)